[toc]

- Runtime Dependency Engine: Schedules and executes the operations according to their read/write dependency.
- Storage Allocator: Efficiently allocates and recycles memory blocks on host (CPU) and devices (GPUs).
- Resource Manager: Manages global resources, such as the random number generator and temporal space.
- NDArray: Dynamic, asynchronous n-dimensional arrays, which provide flexible imperative programs for MXNet.
- Symbolic Execution: Static symbolic graph executor, which provides efficient symbolic graph execution and optimization.
- Operator: Operators that define static forward and gradient calculation (backprop).
- SimpleOp: Operators that extend NDArray operators and symbolic operators in a unified fashion.
- Symbol Construction: Symbolic construction, which provides a way to construct a computation graph (net configuration).
- KVStore: Key-value store interface for efficient parameter synchronization.
- Data Loading(IO): Efficient distributed data loading and augmentation.
Context维护每个任务的上下文,构造的时候需要传递设备信息。包含如下四种主要类型的Context:
- cpu: 运行于普通CPU对应的RAM分配
- pinned_cpu[1] : GPU模式下,主机分配CPU Pinned Memory[2];
- gpu: GPU模式下,主机分配可分页;
- cpushared: Android Shared Memory分配;
Allocator是内存分配器,其提供的方法如下:
storage.cc/StorageImpl 在实现Storage接口的时候,需要首先加载对应的内存管理器(storage_manager.h/StorageManager),然后由管理器实现的实际的Alloc/Free/DirectFree操作。
内存管理器根据不同设备类型,实现不同实现了7种不同的内存管理器。主要实现为:
- NaiveStorageManager
- CPUDeviceStorage : 地址对齐的内存分配. 对应Context::kCPU.
- GPUDeviceStorage: 调用
cudaMalloc/cudaFree进行内存分配和释放; 对应Context::kGPU. - PinnedMemoryStorage: 调用
cudaAllocHost/cudaFreeHost进行主机锁页分配和释放; 对应Context::kCPUPinned.
- CPUSharedStorageManager: 对应Context::kCPUShared.
- PooledStorageManager: 使用内存池进行内存分配和管理。根据Round方式不同, 采用不同的Container索引不同状态的内存。
ResourceManager主要针对随机数生成器资源以及临时空间资源管理进行分配。其提供的方法如下:
默认实现是resource::ResourceManagerImpl。
Request()根据用户需要的资源类型返回对应的资源,主要资源包括:
- kRandom : 对应mshadow::Random object。 就是在不同设备上提供的随机数生成器的封装。
- kTempSpace: 任意长度的动态内存分配。使用前面提到的Storage Allocator分配;
- kParallelRandom:异步随机数分配,参考依赖引擎里面的解释。
- kCuDNNDropoutDesc:参考 3.1.1.3. cudnnDropoutDescriptor_t。提供dropout操作。
运行时依赖引擎(简称RDE)主要负责计算图的全生命周期管理,目标是最大程度的实现并行计算。计算图也就是训练任务/通用计算任务的数据流图。
Mxnet在构建数据流通的时候,还要充分考虑内存的复用,因此,mxnet增加了一个特殊的节点: Object::__del__节点。当当前对象Object不在被使用的时候,就会自动插入这个del节点,对齐独占的内存进行释放。另外就是对于随机数分配,考虑到随机数分配器是线程不安全的,因此要串行化分配随机数资源。
有了以上约束,我们就可以开始构建依赖关系。按照正常的思路,基于数据流的依赖关系,可以借助MVCC的思路,引入版本控制,对于写产生新的版本且标记其引用的版本,对于读标记其引用的版本。然后基于这些依赖关系,构建出一个DAG。然后对DAG进行拓扑排序,然后通过遍历叶子节点找出所有不同的根节点(逆拓扑遍历),找出独立子图。 独立子图之间是可以交给多个线程独立计算。但是, 对于机器学习任务,要支持动态计算图的话,就不能这么简单的计算全局的独立子图了。于是乎,那就mxnet就采用单线程,按照正常的拓扑序列进行计算。后面再符号执行那一块再给出优化方法。
针对依赖引擎的基本原理,官网给出了很生动的解释。 首先Mxnet定义了VarHandle(Engine/Var)表示变量,OprHandle(Engine/Opr)表示操作。那么依赖关系就是以Opr为点,Var为边。在实际执行的时候,OprBlock会对Opr进行封装,作为基本的执行单元。VersionedVarBlock维护VarHandle的版本信息,给同一个VarHandle的不同优先级(依赖关系作为最高优先级)的OprBlock建立一个队列。对应的关系对象如如下:
classDiagram
Opr <|-- ThreadedOpr
ThreadedOpr <|-- OprBlock
OprBlock <|-- VersionedVarBlock
class ThreadedOpr{
+ Engine::AsyncFn fn;
+ std::vector<ThreadedVar*> const_vars;
+ std::vector<ThreadedVar*> mutable_vars;
+ FnProperty prop;
+ std::string opr_name;
}
class OprBlock{
+std::atomic<int> wait
+ThreadedOpr *opr
+Context ctx
-inline int decr_wait()
}
class VersionedVarBlock{
+VersionedVarBlock *next
+OprBlock *triger
+bool write
}
Var <|-- ThreadedVar
ThreadedOpr *-- ThreadedVar
class ThreadedVar {
+ std::mutex mutex_
+ int num_pending_reads_
+ VersionedVarBlock *head_
+ VersionedVarBlock *pending_write_
- inline void AppendReadDependency(OprBlock* opr_block)
- inline void AppendWriteDependency(OprBlock* opr_block)
- inline void CompleteReadDependency(Dispatcher dispatcher)
- inline bool CompleteWriteDependency(Dispatcher dispatcher)
}
其中最关键的部分是ThreadedVar,成员变量解释如下:
- num_pending_reads_ : 当前Var被读依赖的次数;
- pending_write_: 当前被写依赖的的Var, 并且执行该Var所维护的依赖操作队列的头部;_
- head_: 队列尾部;
其次是OprBlock,成员,会有一个wait成员,标记当前Var的依赖操作的个数,如果为0,那么就可以执行当前节点的操作PushToExecute。
实际处理变量的Push的时候,对于只读变量(const_vars), 在ThreadedVar::AppendReadDependency中如果发现该变量队列中没有等待写入的操作(pending_write_ == nullptr), 那么增加num_pending_reads_, 并且减少wait,表示当前读依赖就绪。否则将当前const_var转换成VersionedVarBlock, 并且插入到其关联的队列后面。对于写入,直接在当前变量对应的队列的尾部(head_)插入新的VersionedVarBlock, 如果此时发现num_pending_reads_ == 0, 也就是所有的读依赖都完成了, 减少wait,表示当前写依赖就绪。
当一个实际的读操作完成的时候,就会触发CompleteReadDependency方法,减少num_pending_reads_, 并且判断num_pending_reads_ == 0 && pending_write_ != nullptr的时候,触发该pending_write_执行。
写操作完成的时候,就会相应触发CompleteWriteDependency,首先要递增该Var的版本,然后找到后继的读依赖,一一触发,直到找到一个新的写依赖,并且触发该操作。
示意图如下:

Mxnet::Engine具体提供了3个操作建立DAG:
-
Engine::Push
virtual void Push(OprHandle op, Context exec_ctx, int priority = 0, bool profiling = false) = 0; 作为最后实际执行op的地方。
-
Engine::PushAsync
virtual void PushAsync(AsyncFn exec_fun, Context exec_ctx, std::vector<VarHandle> const& const_vars, std::vector<VarHandle> const& mutable_vars, FnProperty prop = FnProperty::kNormal, int priority = 0, const char* opr_name = nullptr, bool wait = false) = 0; 构建OprBlock, 更新const_vars(只读)和mutable_vars(可写)的VersionedVarBlock维护的队列;
-
Engine::PushSync
virtual void PushSync(SyncFn exec_fn, Context exec_ctx, std::vector<VarHandle> const& const_vars, std::vector<VarHandle> const& mutable_vars, FnProperty prop = FnProperty::kNormal, int priority = 0, const char* opr_name = nullptr) { 调用PushAsync, 但是wait=true.
Mxnet提供了多种执行引擎,不同的执行引擎因为功能不一样,实现的Engine的接口的功能也不一样:
- NativeEngine: 其实是个同步执行引擎。
- CreateThreadedEnginePooled:多设备共享的多线程池执行引擎;
- CreateThreadedEnginePerDevice: 设备独立的多线程池执行引擎;
介绍NDArrary之前,先了解numpy.ndarray。numpy.ndarray 由一段内存连续的类型一样(dtype)的一位数组组成(data字段), 由一个元祖(shape)表示各个维度的大小, 通过步幅(stride tuple)表示遍历该ndarry的时候各个维度上的跨度。
Mxnet的NDArray虽然在用法上跟numpy.ndarray很类似,但是有一些不同点。最主要是对GPU的支持。NDArray依赖于mshadowd完成张量运算(Forward), 以及梯度运算(Backward)。
运算库mshadow
- 延迟计算: 在“=”操作符上执行真正的计算。默认将计算定向到MKL或者BLAS
- 复合模板和递归计算[3]: 通过模板(Unary/Binary)表达式支持多种类型(scalar/vector/matrix等tensor)的运算。TBlob是一种shape可动态改变的数据结构。
- 支持在异构硬件(xpu)上计算/随机数生成等
MXNet提供一个分布式的key-value存储来进行数据交换。它主要有两个函数, 1. push: 将key-value对从一个设备push进存储 2. pull:将某个key上的值从存储中pull出来此外,KVStore还接受自定义的更新函数来控制收到的值如何写入到存储中。最后KVStore提供数种包含最终一致性模型和顺序一致性模型在内的数据一致性模型。
数据读取在整体系统性能上占重要地位。MXNet提供工具能将任意大小的样本压缩打包成单个或者数个文件来加速顺序和随机读取。通常数据存在本地磁盘或者远端的分布式文件系统上(例如HDFS或者Amazon S3),每次我们只需要将当前需要的数据读进内存。MXNet提供迭代器可以按块读取不同格式的文件。迭代器使用多线程来解码数据,并使用多线程预读取来隐藏文件读取的开销
在深度学习基础这一节介绍了自动求导的基本原理。在symbol_in_pictures生动的描述了通过符号式语言计算梯度的过程。在编程模型对比分析了符号式语言相对命令式语言在深度学习的优势。
从一个例子出发进行介绍:
A = Variable('A')
B = Variable('B')
C = B * A
D = C + Constant(1)
# get gradient node.
gA, gB = D.grad(wrt=[A, B])
# compiles the gradient function.
f = compile([gA, gB])
grad_a, grad_b = f(A=np.ones(10), B=np.ones(10)*2)
最终生成的计算图如下:

图1: 计算图示例 箭头左边是命令式模型生成的计算图,右边是基于符号计算生成的计算图,同时生成了自动求导计算数据流图。
首先看图的定义:
classDiagram
Graph *--> NodeEntry
nnvmNode *--> NodeEntry
Graph *--> IndexedGraph
IndexedGraph *--> NodeEntry
Symbol *--> NodeEntry
Node *--> nnvmNode
Node *--> NodeEntry
class nnvmNode{ //nnvm::Node
+ NodeAttrs attrs;
+ std::vector<NodeEntry> inputs;
+ std::vector<ObjectPtr> control_deps;
+ any info;
}
class Symbol {
+ std::vector<NodeEntry> outputs
}
class NodeEntry {
+ uint32_t node_id
+ uint32_t index
+ uint32_t version
}
class Node {
const nnvm::Node* source;
array_view<NodeEntry> inputs;
array_view<uint32_t> control_deps;
std::weak_ptr<nnvm::Node> weak_ref;
}
class IndexedGraph {
std::vector<Node> nodes_;
// Index to all input nodes.
std::vector<uint32_t> input_nodes_;
// Index to all mutable input nodes.
std::unordered_set<uint32_t> mutable_input_nodes_;
// space to store the outputs entries
std::vector<NodeEntry> outputs_;
// mapping from node to index.
std::unordered_map<const nnvm::Node*, uint32_t> node2index_;
// CSR pointer of node entries
std::vector<size_t> entry_rptr_;
// space to store input entries of each
std::vector<NodeEntry> input_entries_;
// control flow dependencies
std::vector<uint32_t> control_deps_;
}
class Graph {
+ std::vector<NodeEntry> outputs
+ std::unordered_map<std::string, std::shared_ptr<any> > attrs
+ mutable std::shared_ptr<const IndexedGraph> indexed_graph_
- const IndexedGraph& indexed_graph()
- inline const T& GetAttr(const std::string& attr_name)
}
对于上图中的input表示当前符号的父节点,output表示当前符号产生的子节点。IndexedGraph包含图的完整信息, nodes_ 包含所有的节点,在vector中的下标就是节点的编号。inputs_nodes_表示当前图依赖的只读的variable节点(没有op), 也就是x,也就是bind函数传入的参数进行绑定的符号对应的节点。input_entries_/control_deps_维护当前节点的所有父节点信息,input_entries_实际上是记录了节点的入边的信息,outputs_记录了每个节点的出边的信息。mutable_input_nodes_记录当前图依赖的数据流可变的节点, $ f=f(x)$。
那么前面例子的步骤详细解释如下:
-
创建符号
mx.sym.Variable('data', attr={'a': 'b'}), 传入符号名称和属性dict, 会调用MXSymbolCreateVariable,最终调用tvm的CreateVariableNode函数,创建一个Symbol, 同时创建一个op为空的nnvm::Node, 将其加入到Symbol的outputs里面去。 这样创建A和B; -
执行
C = A * B, D = C + Constant(1), 创建2个新的符号C和D:In [109]: C.get_internals() Out[109]: <Symbol group [a, b, _mul3]> In [110]: D = C + 1 In [111]: D.get_internals() ## DFS遍历子节点 Out[111]: <Symbol group [a, b, _mul3, _plusscalar1]> -
执行bind,会调用
MXCreateCachedOp创建CachedOp, 然后调用CreateFullGraph构建完整的计算图, 返回前向计算图、后向计算图以及全计算图;ex = c.bind(ctx=mx.cpu(), args={'A' : mx.nd.ones([2,3]), 'B' : mx.nd.ones([2,3])}) -
(可选)前向计算符号结果:
from . import autograd default_ctx = None if self._input_names else self._ctx with autograd.record(train_mode=is_train): self.outputs = self._cached_op(*self._args, default_ctx=default_ctx)CachedOp() 最终调用Forward方法,然后根据条件调用DynamicForward或者StaticForward(区别见后面解释)。 以DynamicForward为例,输入为args, 输出计算结果, 当前符号信息已经存储在Runtime上下文,具体步骤如下:
OpStatePtr CachedOp::DynamicForward( const Context& default_ctx, const std::vector<NDArray*>& inputs, const std::vector<NDArray*>& outputs, bool use_naive_run) { ... // Initialize bool recording = Imperative::Get()->is_recording(); auto op_state = OpStatePtr::Create<DynamicRuntime>(); //创建DynamicRuntime实例, OpStatePtr维护Runtime和一个Var; auto& runtime = op_state.get_state<DynamicRuntime>(); // 获得创建的DynamicRuntime实例 auto state_ptr = GetCachedOpState(default_ctx); // auto& state = state_ptr.get_state<CachedOpState>(); SetForwardGraph(default_ctx, &state.info, recording, inputs); // 这一段构建前向图;也就是GraphInfo->fwd_graph. 并且完成type和shape推导, 然后通过Pass完成PlanMemory计划生成。 后面详细解释。 nnvm::Graph& g = runtime.info.fwd_graph; ... // !use_native_run CreateGraphNDs(g, default_ctx, mem_plan, &array_reqs, &arrays); //按照计划分配内存,创建output所需要的ndarry RunGraph(false, idx, arrays, 0, idx.num_nodes(), std::move(array_reqs), std::move(ref_count), &states, dispatch_modes, recording && inlining_, nullptr, monitor_callback_, monitor_all_); //按照indexed_graph里面的节点组装调用Execute::PushAsync提交执行。将结果写入到output。
... ```
- 生成梯度计算节点. 相对于前向计算,后向计算的时候会把grad_graph.outputs加入到当前graph的outputs。然后在进入bwd_graph、type/shape推导等步骤。
前向构图实际上就是顺序遍历当前符号的outputs列表(例如前面D.get_internals() 获得Symbol group,实际上是符号树后序遍历的结果):
- 如果当前节点第一次遍历,直接将当前节点插入到前向图的outputs列表;
- 否则,构建一个“copy_node”(
Op::Get("_copy");) , input为当前节点,然后将其插入到前向图的outputs列表。
"copy node" 存在的前提是前向计算的时候,节点的实际值是immutable的。那么在实际分配内存的时候, “copy node”就可以进行in-place内存分配优化。
构建后向图是在前向图的基础上,首先通过后序DFS遍历前向图构造前向图的IndexedGraph。 从output_里面去除mutable_input_nodes_中的节点,然后调用pass::MXGradient。
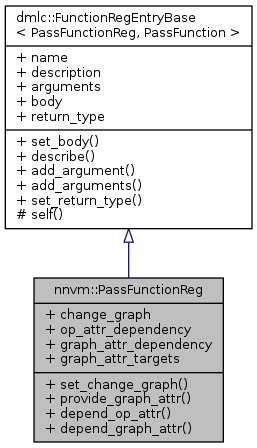
Pass 管理
tvm使用PassFunctionReg来表示Pass。表示如下:
查看gif){kind=link}
然后通过宏NNVM_REGISTER_PASS注册Pass:
// register pass
NNVM_REGISTER_PASS(MXGradient)
.describe(R"(Return a gradient graph of src.attrs["ys"] wrt src.attrs["xs"])")
.set_body(Gradient) //设置Pass入口函数, 参数是一个函数对象Graph Gradient(Graph src)。
.set_change_graph(true) //表示pass会改变当前图结构
.depend_graph_attr("grad_ys")
.depend_graph_attr("grad_xs")
.depend_graph_attr("in_arg_shapes")
.depend_graph_attr("in_arg_dtypes")
.depend_graph_attr("grad_ys_out_grad");
所以最终处理的pass transformer是Graph Gradient(Graph src)。
梯度计算
在有了xs/ys以及之后head_grads(头梯度矩阵)之后, 就可以开始生成求导节点了。步骤如下:
1. 通过后序遍历,求前向图的拓扑序, 例如图1左边会生成 A, B, C , 1, D序列.
2. 初始化ys为head_grads, 通过判断所有的ys节点可以最终到达xs(判断所有的xs是否在第一步的序列里面),也就是可以求微分;
3. 根据链式求导法则,构造一个**梯度聚合函数**;
4. 按照逆拓扑序遍历每一个因变量ys节点,如果改节点的input是空,例如图1的d(D)节点,然后通过**梯度聚合函数**该节点在各个自变量xs上的梯度和;
5. 如果当前节点有入边(input),继续进行后向传播, 参考[自动求导](./Deep_Learning_Basics.pdf)自动求导。如果当前节点的梯度全都是0, 那么创建一个新的
6.
生成full_graph
最后full_graph就是将forward_graph和backward_graph的outputs串联起来。
内存分配跟编译器的寄存器分配问题很类似。寄存器分配典型的算法包括线性扫描[7, 8], 图着色
https://dmlc-core.readthedocs.io/en/latest/parameter.html
- https://lwn.net/Articles/600502/
- https://blog.csdn.net/chenxiuli0810/article/details/90899014
- https://github.com/dmlc/mshadow/blob/master/guide/exp-template/README.md
- https://mxnet.apache.org/versions/1.0.0/architecture/note_data_loading.html
- https://mxnet.apache.org/versions/1.0.0/architecture/program_model.html
- https://mxnet.apache.org/versions/1.0.0/architecture/note_memory.html
- http://web.cs.ucla.edu/~palsberg/course/cs132/linearscan.pdf
- https://www.zhihu.com/question/29355187/answer/99413526