Stefan Baur*, David Emmerichs*, Frank Moosmann, Peter Pinggera, Björn Ommer and Andreas Geiger (*: equal conribution)
[Paper] [Supplementary Material] [Project Page]

This repository has been developed and tested for
- Ubuntu 18.04
- CUDA 10.2
- CUDNN 7.6.5
First of all, clone the repository:
git clone --recursiveDownload the datasets Kitti Raw, nuscenes, Kitti Scene Flow.
Then, create folder with symlinks to your datasets (referred to as INPUT_DATADIR in the following) that you would like to use.
mkdir -p /path/to/my_datasets
cd /path/to/my_datasets
ln -s /path/to/nuscenes/dataset nuscenes
ln -s /path/to/kitti_raw kitti_raw
ln -s /path/to/kitti_scene_flow_data kitti_sf_dataAlso, create a destination folder for the training logs (OUTPUT_DATADIR):
mkdir -p /path/to/output_destinationChange into the base directory of the repo and set INPUT_DATADIR (path to your datasets with the symlinks) and OUTPUT_DATADIR (path to logs) in scripts/set_env_variables.bash:
cd path/to/this/repo
vim scripts/set_env_variables.bashCreate the virtual environment, build tensorflow custom ops and set the necessary env variables: SRC_DIR, CFG_DIR, INPUT_DATADIR, OUTPUT_DATADIR.
# in root folder of this repository execute
python3 -m venv .venv --prompt usfl
source .venv/bin/activate
pip3 install -U setuptools pip
pip3 install -r requirements.txt
bash scripts/build_all.bash # builds TF custom ops
source scripts/set_env_variables.bash # sets environment variablesAlso, you need to install the nuscenes-devkit.
The entry point for trainings is unsup_flow/cli.py. We use a unsup_flow/config/config.yml with incremental configurations to configure the experiments. The default configuration is loaded for every experiment.
# default experiment
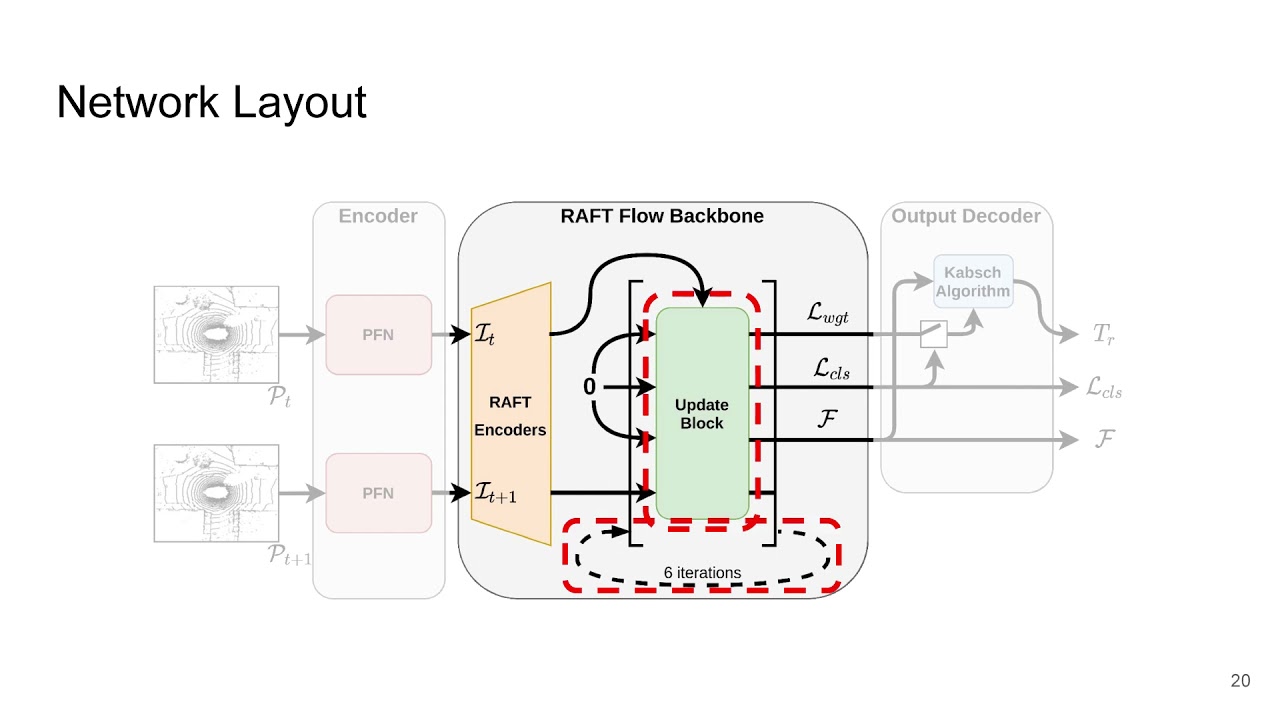
python unsup_flow/cli.py --prodIncremental config changes can be applied using the -c flag. For example, to run a training using the RAFT flow backbone on nuscenes without using the confidence weights for static aggregation:
python unsup_flow/cli.py --prod -c nuscenes sota_us sota_net no_stataggr_weightThis will, starting from the default config, recursively apply the changes to the config that are specified in the config file under sections nuscenes, sota_us, sota_net, no_stataggr_weight in that order.
Individual changes to the config can also be made using the -kv flag, for example to change the initial learning rate from 0.0001 (default) to 0.005:
python unsup_flow/cli.py --prod -c nuscenes -kv learning_rate initial 0.005❗ NOTE:
-kvtakes a list of strings (e.g.learning_rate initial) and then a value (e.g.0.005). The list of strings specify the config value location in the hierarchy of dictionaries!
Go to usfl_io/io_tools.py:1009 and implement a function that returns a TF Dataset, returning the following dict:
dict:
name []
pcl_t0 [N0, 3]
ref_t0 [N0] (opt.)
semantics_t0 [N0] (opt.)
pcl_t1 [N1, 3]
ref_t1 [N1] (opt.)
semantics_t1 [N1] (opt.)
odom_t0_t1 [4, 4] (opt.)
flow_gt_t0_t1 dict (opt.):
flow [N0, 3]
annotation_mask [N0]
nn_interpolated_mask [N0]
exact_gt_mask [N0]
ego_flow_mask [N0] (opt.)
flow_gt_t1_t0 dict (opt.):
flow [N1, 3]
annotation_mask [N1]
nn_interpolated_mask [N1]
exact_gt_mask [N1]
ego_flow_mask [N1] (opt.)You can use one of the existing datasets for inspiration. Most of the above data is optional (opt.) and will be used to generate informative metrics.
Coordinate system: Positive z-Axis is opposite to the direction of gravity, x is forward, y to the left. (Right handed coordinate system.) The origin should be around 1.7m above ground and in the center of the recording sensor.
@InProceedings{Baur_2021_ICCV,
author = {Baur, Stefan Andreas and Emmerichs, David Josef and Moosmann, Frank and Pinggera, Peter and Ommer, Bj\"orn and Geiger, Andreas},
title = {SLIM: Self-Supervised LiDAR Scene Flow and Motion Segmentation},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2021},
pages = {13126-13136}
}Source code has been tested solely for our own use cases, which might differ from yours. Notice: Before you use the program in productive use, please take all necessary precautions, e.g. testing and verifying the program with regard to your specific use.