![]()
PreScyent is a trajectory forecasting library, built upon pytorch_lightning
It comes with datasets such as:
And methods to perform trajectory prediction on this kind of datasets, and baselines to compare with.
You can install released versions of the project from PyPi. install using pip from source (you may want to be in a virtualenv beforehand):
pip install prescyentYou can build an image docker from the Dockerfile at the source of the repository.
Please refer to docker documentation for build command and options.
The Dockerfile is designed to be run interactively.
If you want to setup a dev environment, you should clone the repository:
git clone [email protected]:hucebot/prescyent.git
cd prescyentThen install using pip from source (you may want to be in a virtualenv beforehand):
For dev install (recommended if you intent to add new classes to the lib) use:
pip install -e .Each dataset is composed a list Trajectories, splitted as train, test and val.
In this lib, we call "Trajectory" a sequence in time splitted in F frames, tracking P points above D dimensions.
It is represented with a batched tensor of shape:
(B, F, P, D).
Note that unbatched tensors are also allowed for inference.
For each Trajectory we describe its tensor with Features, a list of Feature describing what are the dimensions trasked for each point at each frame. Theses allows conversions to occur in background or as preprocessing, as well as using some distance specific losses and metrics (e.g. euclidian distance for Coordinates and geodesic distance for Rotations)
Alongside each trajectory tensor, some dataset provide some additional "context" (images, center of mass, velocities...), that is represented inside the library as a dictionary of tensors.
We use HDF5 file format to load a dataset internally. Please get the original data and pre process them using the scripts in /datapreprocessing to match the library's format.
Then when creating an instance of a Dataset, make sure you pass the path to the newly generated hdf5 file to teh dataset's config attribute hdf5_path.
Download AndyData-lab-prescientTeleopICub's data here and unzip it, it should be following this structure:
├── AndyData-lab-prescientTeleopICub
│ └── datasetMultipleTasks
│ └── AndyData-lab-prescientTeleopICub
│ ├── datasetGoals
│ │ ├── 1.csv
│ │ ├── 2.csv
│ │ ├── 3.csv
│ │ ├── ...
│ ├── datasetObstacles
│ │ ├── 1.csv
│ │ ├── 2.csv
│ │ ├── 3.csv
│ │ ├── ...
│ ├── datasetMultipleTasks
│ │ ├── BottleBox
│ │ │ ├── 1.csv
│ │ │ ├── 2.csv
│ │ │ ├── 3.csv
│ │ │ ├── ...
│ │ ├── BottleTable
│ │ │ ├── 1.csv
│ │ │ ├── 2.csv
│ │ │ ├── 3.csv
│ │ │ ├── ...
│ │ ├── ...
For Human3.6M you need to download the zip here and prepare your data following this directory structure:
└── h36m
| ├── S1
| ├── S5
| ├── S6
| ├── ...
| ├── S11For AndyDataset you need to download the zip here and prepare your data following this directory structure:
└── AndyData-lab-onePerson
| └── xsens_mnvx
| ├── Participant_541
| ├── Participant_909
| ├── Participant_2193
| ├── ...
| ├── Participant_9875The trajectory prediction methods are organized as Predictor classes.
For example, the MlpPredictor class is the implementation of a configurable MLP as a baseline for the task of Trajectory prediction.
Relying on the PytorchLightning Framework, it instantiates or load an existing torch Module, with a generic predictor wrapper for saving, loading, iterations over a sample and logging.
Feel free to add some new predictor implementations following the example of this simple class, inheriting at least from the BasePredictor class.
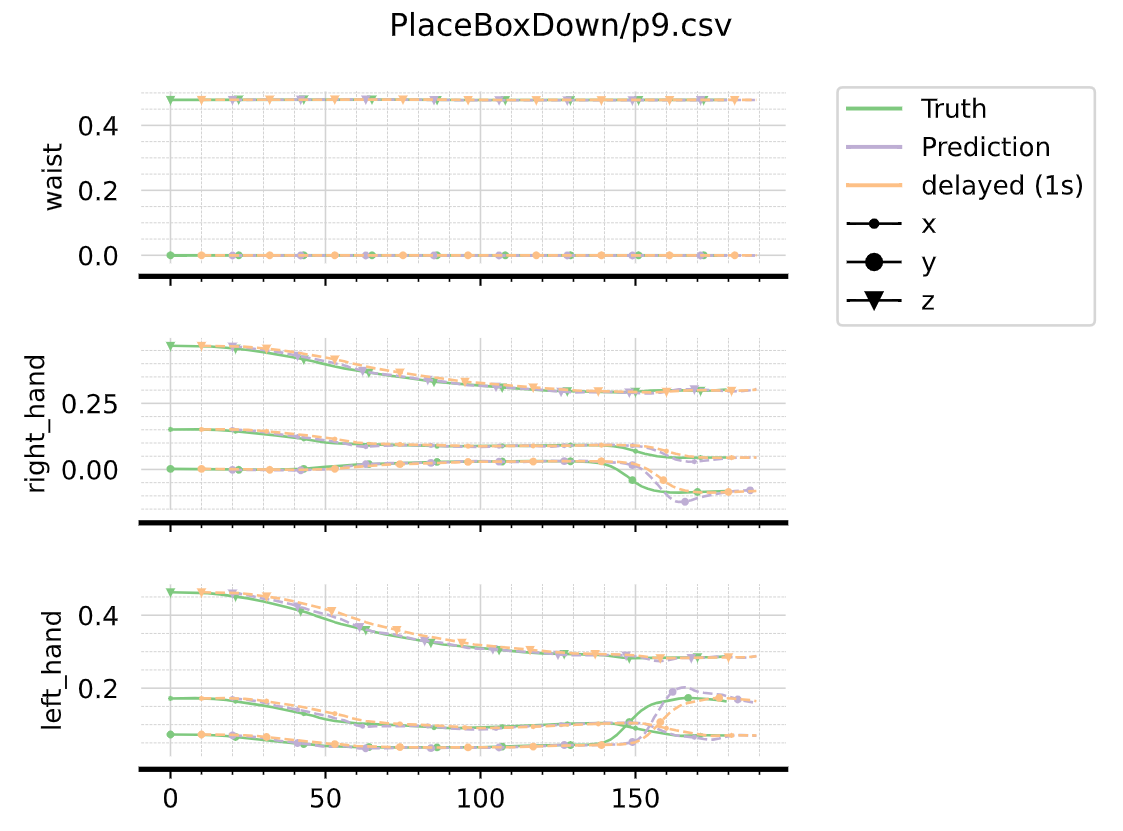
We also provide a set of functions to run evaluations and plot some trajectories.
Runners take a list of predictors, with a list of trajectories and provide an evaluation summary on the following metrics:
- Average Displacement Error (ADE)
- Final Displacement Error (FDE)
- Mean Per Joint Position Error (MPJPE)
- Inference Time
Please look into the examples/ directory to find common usages of the library
We use tensorboard for training logging, use tensorboard --logdir {log_path} to view the training and testing infos (default log_path is data/models/)
For example to run the script for mlp training on teleopIcub dataset use:
python examples/mlp_icub_train.pyIf you want to update start a training from a config file (as examples/configs/mlp_h36m.json), use the following:
python examples/train_from_config.py examples/configs/mlp_h36m.jsonAfter installing, run this to make sure the installation is ok
python -m unittest -vPredictors inherit from the BasePredictor class, which define interfaces and core methods to keep consistency between each new implementation.
Each Predictor defines its PredictorConfig with arguments that will be passed on to the core class, again with a BaseConfig with common attributes that needs to be defined.
siMLPe
Wen Guo, Yuming Du, Xi Shen, Vincent Lepetit, Xavier Alameda-Pineda, et al.. Back to MLP: A Simple Baseline for Human Motion Prediction. WACV 2023 - IEEE Winter Conference on Applications of Computer Vision, Jan 2023, Waikoloa, United States. pp.1-11. ⟨hal-03906936⟩
AndyDataset
Maurice P., Malaisé A., Amiot C., Paris N., Richard G.J., Rochel O., Ivaldi S. « Human Movement and Ergonomics: an Industry-Oriented Dataset for Collaborative Robotics ». The International Journal of Robotics Reserach, Volume 38, Issue 14, Pages 1529-1537.
TeleopIcub Dataset
Penco, L., Mouret, J., & Ivaldi, S. (2021, July 2). Prescient teleoperation of humanoid robots. arXiv.org. https://arxiv.org/abs/2107.01281
H36M Dataset
Human3.6M: Large scale datasets and predictive methods for 3D human sensing in natural environments. (n.d.). IEEE Journals & Magazine | IEEE Xplore. https://ieeexplore.ieee.org/document/6682899
On the Continuity of Rotation Representations in Neural Networks
Zhou, Y., Barnes, C., Lu, J., Yang, J., & Li, H. (2018, December 17). On the Continuity of Rotation Representations in Neural Networks. arXiv.org. https://arxiv.org/abs/1812.07035