I am not the author of the apriltag2 algorithm. I am just trying to use it. My goal is to use it for a group of quadrotor UAVs equipped with onboard cameras.
ATTENTION: This repository is made of 2 parts
The first part is the one coming from the folder apriltag-2016-12-01. I downloaded it here. In this part there is basically all the apriltag2 code and it is written in C.
The second part is the one which I wrote and it is needed to publish the apriltag2 data over the ROS network. This part is the one contained in the folder apriltag2_example.
AprilTag is a visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera calibration. Targets can be created from an ordinary printer, and the AprilTag detection software computes the precise 3D position, orientation, and identity of the tags relative to the camera. Implementations are available in Java, as well as in C. Notably, the C implementation has no external dependencies and is designed to be easily included in other applications, as well as portable to embedded devices. Real-time performance can be achieved even on cell-phone grade processors.
The two main papers to refer to understand the apriltag algorithm are the following:
- IROS 2016 - AprilTag 2: Efficient and robust fiducial detection: this is the paper which refers to the version of the algorithm that we want to use
- ICRA 2011 - AprilTag: A robust and flexible visual fiducial system: this is the paper which explains how the first version of the algorithm works
I am not the author of the apriltag2 algorithm. We are trying to use the apriltag2 algorithm over ROS. Something like that was already done for the first version of the apriltag algorithm and can be found here
Our goal is to use it for a group of quadrotor UAVs equipped with onboard cameras.**
We would like to test the apriltag2 on the following cameras:
- flea FL3-U3-32S2C
- We are considering to use also a basler Dart area scan camera.
Specifically we would like to carry out these experiments with bearing information coming directly from the apriltag2 algorithm running on the ODROIDs embedded on the quadrotors
The following is a picture of one of the first flights we did with apriltags mounted on our quadrotors:

More about me can be found here: http://www.irisa.fr/lagadic/team/Fabrizio.Schiano.html
My goal is to extract a bearing vector from a monocular camera. A bearing vector beta_ij is a unit-norm vector which goes from the robot i to the robot j and it is expressed in the body frame of robot i. In order to do this I would like to use the apriltag2 algorithm. All this is driven by the need of detection of multiple quadrotor UAVs through onboard cameras (a flea3 by PointGrey: https://www.ptgrey.com/flea3-32-mp-color-usb3-vision-sony-imx036-camera) in order to retrieve a bearing IJ measurement (i.e. a unit-vector that goes from the origin of the body frame of the robot I to the origin of the body frame of the robot J).
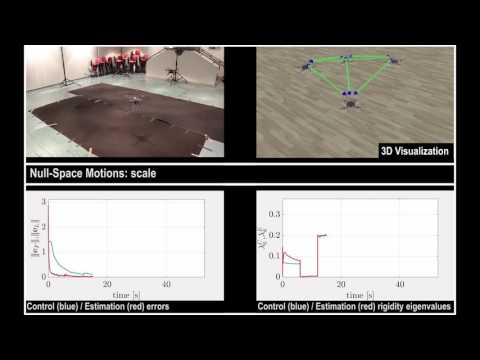
In the following video you could see how my system is working for now. I am using a flea3 by Pointgrey, converting its image in OpenCV and streaming it (with the camera_info topic) over ROS. Then there is a node which is subscribing to the image+camera_info and applying the apriltag2 algorithm to the image. This node is then publishing the pose of the tag in the camera frame.
Check HERE for some videos of preliminary results of what I am doing.
This repository is coming from the folder apriltag-2016-10-21. I downloaded it here: https://april.eecs.umich.edu/software/apriltag.html
AprilTag is a visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera calibration. Targets can be created from an ordinary printer, and the AprilTag detection software computes the precise 3D position, orientation, and identity of the tags relative to the camera. Implementations are available in Java, as well as in C. Notably, the C implementation has no external dependencies and is designed to be easily included in other applications, as well as portable to embedded devices. Real-time performance can be achieved even on cell-phone grade processors.
It is possible that in order to use our repository you will need to install some external libraries. A list of the needed external libraries will appear in this guide as soon as possible.
The default installation will place headers in /usr/local/include and shared library in /usr/local/lib. It also installs a pkg-config script into /usr/local/lib/pkgconfig.
$ make
$ sudo make install
To install to a different directory than /usr/local:
$ PREFIX=/some/path sudo make install
A basic AprilTag application can be seen in example/apriltag_demo.c.
Initialization: instantiate a detector and at least one tag family.
apriltag_detector_t *td = apriltag_detector_create();
apriltag_family_t *tf = tag36h11_create();
apriltag_detector_add_family(td, tf);
Some tag detector parameters can be set at this time. The default parameters are the recommended starting point.
td->quad_decimate = 1.0;
td->quad_sigma = 0.0;
td->refine_edges = 1;
td->refine_decode = 0;
td->refine_pose = 0;
Increase the image decimation if faster processing is required; the trade-off is a slight decrease in detection range. A factor of 1.0 means the full-size input image is used.
Some Gaussian blur (quad_sigma) may help with noisy input images.
Detection: a single one-line call will process an input image and return a list of detections.
zarray_t *detections = apriltag_detector_detect(td, im);
for (int i = 0; i < zarray_size(detections); i++) {
apriltag_detection_t *det;
zarray_get(detections, i, &det);
// Do something with det here
}
apriltag_detections_destroy(detections);
zarray is a container class which is included with apriltag. To process through the list of detections, use zarray_get, as illustrated above.
The caller is responsible for freeing detections by calling apriltag_detections_destroy().
Cleanup: free the detector and tag family when done.
apriltag_detector_destroy(td);
tag36h11_destroy(tf);
Note that this library has no external dependencies. Most applications will require, at minimum, a method for acquiring images.
See example/opencv_demo.cc for an example of using AprilTag in C++ with OpenCV. This example application can be built by executing the following:
$ cd examples
$ make opencv_demo
Image data in a cv::Mat object can be passed to AprilTag without creating a deep copy. Simply create an image_u8_t header for the cv::Mat data buffer:
cv::Mat img;
image_u8_t img_header = { .width = img.cols,
.height = img.rows,
.stride = img.cols,
.buf = img.data
};
The tag detector doesn't consider the scale of the tag. Here is some sample code to scale the tag position.
(You need to put, in the following code, in tagsize the size of the tag you are using)
for (int i = 0; i < zarray_size(detections); i++) {
apriltag_detection_t *det;
zarray_get(detections, i, &det);
matd_t *M = homography_to_pose(det->H, -fx, fy, cx, cy);
double scale = tagsize / 2.0;
MATD_EL(M, 0, 3) *= scale;
MATD_EL(M, 1, 3) *= scale;
MATD_EL(M, 2, 3) *= scale;
}
Basically the detector assumes each tag is centered at the origin of its own coordinate system, with the tag corners at (-1, -1), (1, -1), (1, 1), and (-1, 1). Therefore, it assumes the tag's width is 2 units. To get the tag pose in real units, scale the position by (tag size in meters)/2, or whatever unit you prefer.
I think you should use an
This section is really under development.
You should:
-
include apriltag2_example package in the src of your catkin_ws and
catkin_makeand everything was compiled I usually do that simply creating a symbolic link in thesrcfolder of my catkin_ws. In this wayln -s /pathToYourFolder/apriltag2_exampleOf course you need to put YOUR path in the
pathToYourFolder -
Compile the apriltag2 libraries and
sudo make installthem as explained above. If everything works, you should be able to run the following command
rosrun apriltag2_example apriltag2_exe -f tag16h5
and have as an output

this is the output if there is no camera publishing on the topic speicified HERE
- Flying with a quadrotor which is recording images and saving them on a SD Card. The apriltag is applied OFFLINE. We are currently working on an ONLINE solution

- Figured out how to get a bearing information from the apriltag algorithm

For more details about the algorithm look here: https://april.eecs.umich.edu/media/pdfs/wang2016iros.pdf
The camera we are using has a maximum resolution of 2080x1552. We chose to do a binning of the image in hardware on the sensor (there is an alternative binning you can do in software through ROS) and in this way the apriltag2 algorithm has to deal with an image which is 1040x776. The binning is changing the resolution of the image without changing the region of interest (ROI). The 2 different images can be seen below:
2080x1552

1040x776
