This is the official pytorch implementation of PolarPoint-BEV.

Download and setup CARLA 0.9.10.1 (from TCP)
mkdir carla
cd carla
wget https://carla-releases.s3.eu-west-3.amazonaws.com/Linux/CARLA_0.9.10.1.tar.gz
wget https://carla-releases.s3.eu-west-3.amazonaws.com/Linux/AdditionalMaps_0.9.10.1.tar.gz
tar -xf CARLA_0.9.10.1.tar.gz
tar -xf AdditionalMaps_0.9.10.1.tar.gz
rm CARLA_0.9.10.1.tar.gz
rm AdditionalMaps_0.9.10.1.tar.gz
cd ..
Clone this repo and build the environment
git clone https://github.com/lab-sun/PolarPoint-BEV.git
cd PolarPoint-BEV
conda env create -f environment.yml --name PolarPoint-BEV
conda activate PolarPoint-BEV
Download the datasets and then extract it in the file of Data
The Control Prediction Module of the XPlan network is firstly pre-trained on the dataset from TCP
To train the XPlan network, please refers to trainset and valset.
- Download the pretrained weights and then extract it in the file of
weight - The link for pretrained weights is weight.
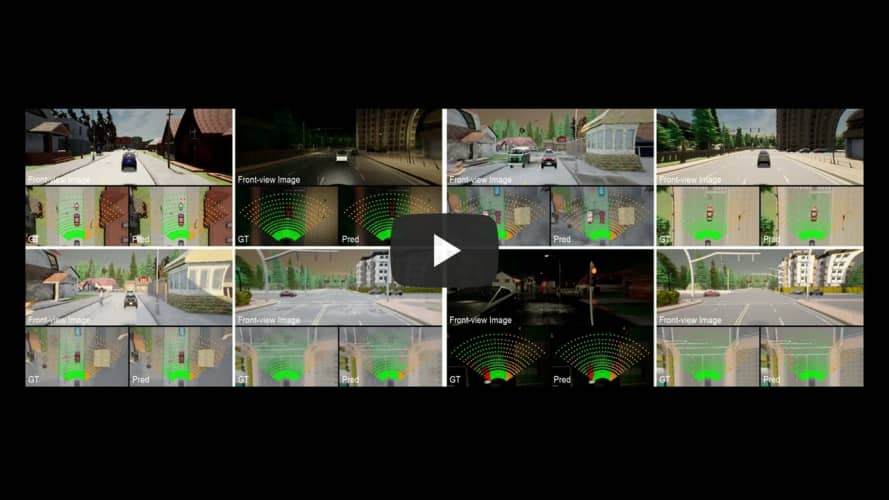
The evaluation is performed in the Carla Simulator.
Step1: Launch the Carla server,
cd CARLA_ROOT
./CarlaUE4.sh --world-port=2000 -opengl
Set the parameters in the leaderboard/scripts/run_evaluation.sh.
Step2: Start the evaluation
sh leaderboard/scripts/run_evaluation.sh
If you found this code or dataset are useful in your research, please consider citing
@article{feng2024polarpoint,
title={PolarPoint-BEV: Bird-eye-view Perception in Polar Points for Explainable End-to-end Autonomous Driving},
author={Feng, Yuchao and Sun, Yuxiang},
journal={IEEE Transactions on Intelligent Vehicles},
year={2024},
publisher={IEEE}
}