SCOTS: Automated Synthesis of Symbolic Controllers for General Nonlinear Systems [static CUDD-lib Version]
SCOTS is a C++ tool (with a small Matlab interface) to synthesize controller for possibly perturbed nonlinear control systems with respect to safety and reachability specifications.
This version of SCOTS is forked from the version in LRZ-Gitlab with the following modifications:
- The CUDD library is included pre-configured for ease of installation and use,
- The CUDD library is used as a static-link library,
- A Windows VisualSudio build project is provided for the CUDD library,
- Some minor fixes are applied to the CUDD libtary code and SCOT's code, and
- a Docker installtion with the BDDImplement tool included.
Here, we assume you will be using a Linux or MacOS machine. Commands will be slightly different on Windows if you use Windows PowerShell. First, make sure you have docker installed (see Docker installation guide for: MacOS, Ubuntu Linux or Windows). Also, make sure to configure Docker to use sufficient resources (e.g., enough CPU cores). Otherwise, OmegaThreads will run slower than expected.
Download the Dockerfile:
$ mkdir scots-ready
$ cd scots-ready
$ curl https://raw.githubusercontent.com/mkhaled87/scots-ready/master/Dockerfile -o DockerfileBuild the Docker container (don't forget the DOT at the end):
$ docker build -t scots/latest .The building process will take proximately 15 minutes. During the build, you may recieve some red-colored messages. They do not indicate errors, unless you recieve an explicit red-colored error message. Once done, run/enter the image's interactive shell:
$ docker run -it -v ~/docker_shared:/docker_shared scots/latestNote that by the previous command, we made a pipe between host and the container (this part: -v ~/docker_shared:/docker_shared) which will later you to move files (e.g., the synthesized controller) from the container to the host.
Now SCOTS is installed in (/scots-ready/). You may navigate to it:
/# cd scotsNow, you may continue to the Quick Start section below to run a simple examnple.
SCOTS requires only a modern C++ development environment where you can compile C++ (v11) source codes. All other requirements are included with SCOTS.
To make full use of SCOTS, you may need to have MATLAB installed to be able to simulate the synthesized controllers using the provided MATLAB interface in /mfiles.
SCOTS was originally developed to work in Linux and MacOS. However, we provide a small guide below on how to install it also in Windows. SCOTS is known to work much slower in Windows.
We use the g++ compiler and clang++ compiler frontend. If you dont have them installed, please install them first. If you are using Ubuntu Linux, you may install the compiler and required libraries using the commands:
$ sudo apt-get install git build-essential gcc g++ clang
If you howver using MacOS, installing XCode frorm Apple Store will be enough. Now, clone this repisatory and move to its root:
$ git clone https://github.com/mkhaled87/scots-ready.git ./scots
$ cd scots
Now, we build the included CUDD library by running the command:
$ make
This will build the included CUDD library as a static-link library.
You may use Windows Subsystem For Linux (WSL) and follow the same instructions before to run SCOTS. However, the MATLAB interface is not be supported.
Another option is to use the provided VisualStudio build project provided with the CUDD library to build a static version of the library. After building, the static library will be loccacted in cudd-3.0.0/lib. You may then make your own VisualStudio projects from any example source code and link against the library.
If you don't have matlab or plan to use it later, skip this section for now. The matlab interface allows loading the output files of SCOTS inside matlab and simulating the closed loop of the control system.
Open MATLAB and navigate to the folder mfiles. Use the command window of MATLAB and run the command:
>> Install
This all build/install the MATLAB interface and will also add the mfiles folder and all subfolders to MATLAB's path. This should work in Linux, MacOS and Windows (not WSL).
Now, we test scots with one of the provided examples. Navigate, build and run the hscc16/vehicle1 example:
$ cd examples/hscc16/vehicle1
$ make
$ ./vehicle
If you are using Docker, you are limited to the previous step where you generated the controller. A simulation using MATLAB from inside Docker is currently not supportef. Continue if you installed SCOTS directly not using Docker. Now, form inside MATLAB, navigate to the examples folder examples/hscc16/vehicle1 and simulate the closed loop using the command:
>> vehicle
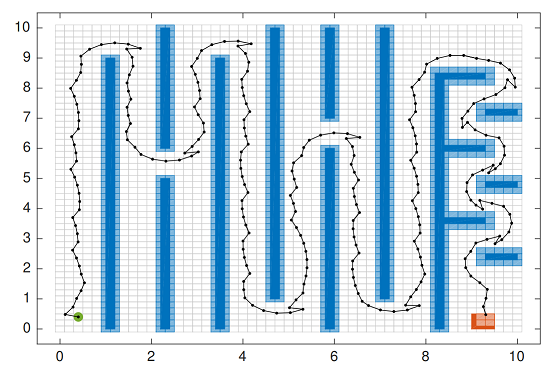
This should simulate the colsed loop of the autonomous vehicle and show a result similar to the following:
-
./bdd/:
Contains the source C++ source code for the SCOTS classes which use Binary Decision Diagrams as underlying data structure.
-
./doc/:
C++ Class documentation directory.
-
./examples/:
Some C++/Maltab programs demonstrating the usage of SCOTS.
-
./manual/:
Contains a the manuel with its tex source.
-
./mfiles/:
Contains an mfile as a wrapper to the mex-file functions.
-
./mfiles/mexfiles/:
mex-file to read the C++ output from file.
Following the next steps can help you get your example through out the commom problems users face when woring with SCOTS:
- First simulate the dynamics only using (MATLAB + the ODE) to get an estimate about the bounds of the state/input sets that are needed to solve the problem.
- Fix the bounds of the state/input according to step 1: give space to the dynamics to move (state space bounds) and to the controller to be able to achieve the specs (the input bound).
- Make sure your target/obstacle/safe sets are inside the state domain.
- Make sure the growth-bound is derived correctly: you may start with (r = 0, i.e. assuming a deterministic system where for each input and state there is only one post state) to test the feasibility of the problem, and then invest time finding the
- Make sure the same exact model (same math formulation) is used in C++ and MATLAB (significant differences can arise from the order the floating-point operations are computed).
- Compile/Run your example.
- In MATLAB simulation, make sure the initial state (x0) is (1) in a location that can possibly reach the target if you have REACH (or REACH-AVOID) the specs (e.g., don’t put the initial state inside an obstacle), or (2) inside the safe set in case you have SAFE specs.
- Run the MATLAB simulation.
Please report any problems/bugs you face while installing and running SCOTS to Mahmoud Khaled.