General:
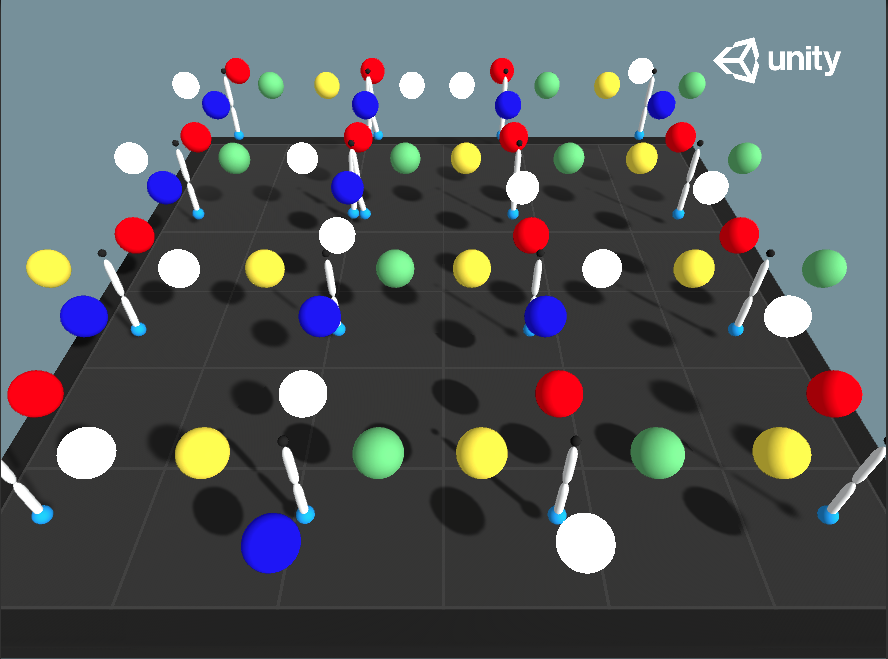
This repo contains a fully articulated robotic arm controller solving a sequential reaching task akin to a serial reaction time task, allowing close comparison of different learning algortihmns such as PPO, SAC, Q-learning etc. with human behavior on the same task. Agents are trained in parallel to each other within the same environment as shown below, to speed up training and reduce randomness, when examining performance metrics.
The target activation sequence can either be 1) a self repeating deterministic sequence or a 2) random activation sequence without repitions. Comparisong between the two sequences shows that a self repeating sequence results in a circular movement trajectory over the targets to optimize reward, while a random sequence results in an optmimization strategy in which the agents centers itself equidistant to all 4 targets as it is unable to predict the targets next location.


Training:
To train and replicate results it is recommended to 1) create your own executable build within the Unity environment via the "File/Build Setting" tab and 2) create a corresponding shell ".shl" file to train from scratch. Please select the corresponding target platform you wish to run the executable one. An example for a shell file to train PPO is given below:
your_shell_file.sh
#!/bin/bash
for i in {1..3}
do
echo "Starting run $i"
mlagents-learn config/ppo/Reacher.yaml --base-port 38278 --no-graphics --env=Project/Builds/your_build_no_1 --run-id=your_build_no_1_run-"$i"
done
Note that the .yaml file contains all hyperparameters for training.
Given that you have created your own build "your_build_no_1" and want to initiate training, start your concole, 1. activate your virtual environment, 2. go to your project folder, 3. ensure your shell file your_shell_file.sh callable and begin training by calling your shell file your_shell_file.sh as:
1. conda activate //anaconda3/envs/UnityML
2. cd /Users/last_name/project_location
3. chmod +x your_shell_file.sh
4. ./your_shell_file.sh
Note that for windows or linux the execution procedure may differ as this was tested on a mac os.
C# scrips:
"Game_Manager.cs" : manages properties of the game. Target activation sequence, successful reaching to an active target, reward giving and curriculum learning are defined here. If desired random activation can be disable which will result in a deterministic activation sequence in the Unity environment's UI.
Curriculum learning can as well be disable or enabled in the environment's UI.
"Gen_Targets.cs" : manages properties of the targets, like color, the number of targets to be instantiates. If desired targets can initialised at random locations, which we used for experimentation but excluded in the present study. Random target location is activated in the unity environment's UI and ticking the box "random_location.
"Yates.cs" : Target activation is governed by an identity matrix of size 4 x 4. Here we define a Fisher-Yates shuffle to randomly shuffle the matrix to create a random activation sequence. Results in the same as sampling from a random uniform distribution. The benefit of using the identity matrix and applying a Fisher-Yates shuffle is that we can examine which targets are supposed to be inactive as these are codes 0 and active targets are coded 1.
"Noise.cs" : A Box-Muller transformation is applied to sample from a gaussian normal. This script is never called, but used for initial experimentation.